Bus CAN : L'informatique dans l'automobile.
Le protocole CAN, pour Controller Area Network, est un protocole de communication conçu à l’origine pour l’industrie automobile, afin de permettre aux différents composants électroniques d’un véhicule de communiquer entre eux de manière fiable et rapide. Il est aujourd’hui également utilisé dans d’autres domaines comme l’aéronautique, l’automatisation industrielle ou les équipements médicaux.
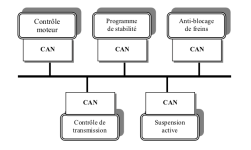
Le CAN fonctionne selon un modèle de bus, dans lequel tous les nœuds (ou noeuds) sont connectés à un même câble et peuvent y envoyer ou recevoir des messages. La communication se fait sans maître central : chaque appareil peut prendre la parole sur le bus à tout moment, selon un système de priorité intégré qui évite les collisions et garantit la bonne transmission des messages critiques.
L’un des grands atouts du protocole CAN est sa robustesse. Il est capable de fonctionner dans des environnements électriquement bruyants, comme ceux que l’on trouve dans les véhicules, tout en assurant une très faible probabilité d’erreur grâce à ses mécanismes intégrés de vérification et de correction.
En résumé, le protocole CAN est une solution fiable, déterministe et économique pour faire communiquer plusieurs systèmes embarqués. Son succès repose sur sa simplicité, sa tolérance aux pannes et sa capacité à transmettre des données en temps réel, ce qui en fait un standard incontournable dans de nombreux secteurs techniques.
Posté le : 24 avr. 2025, 06:44:19 par Tritri
Général